สำหรับในยุคปัจจุบันà¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œ (Industrial Robot) ได้เข้ามามีบทบาทสำคัà¸à¸à¸±à¸šà¸§à¸‡à¸à¸²à¸£à¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¹ƒà¸™à¸›à¸£à¸°à¹€à¸—ศไทยมาà¸à¸‚ึ้น เนื่à¸à¸‡à¸ˆà¸²à¸à¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¹€à¸›à¹‡à¸™à¹€à¸„รื่à¸à¸‡à¸ˆà¸±à¸à¸£à¸—ี่ถูà¸à¸à¸à¸à¹à¸šà¸šà¸„วบคุมด้วยระบบà¸à¸±à¸•à¹‚นมัติโดยà¸à¸²à¸£à¹€à¸‚ียนโปรà¹à¸à¸£à¸¡à¹ƒà¸«à¹‰à¹€à¸„ลื่à¸à¸™à¸—ี่ได้à¸à¸¢à¹ˆà¸²à¸‡à¸™à¹‰à¸à¸¢ 3 à¹à¸à¸™à¸«à¸£à¸·à¸à¸¡à¸²à¸à¸à¸§à¹ˆà¸² ซึ่งà¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œ (Industrial Robot) สามารถà¸à¸à¸à¹à¸šà¸šà¹ƒà¸«à¹‰à¸¢à¸¶à¸”à¸à¸¢à¸¹à¹ˆà¸à¸±à¸šà¸—ี่หรืà¸à¸¢à¹‰à¸²à¸¢à¸•à¸³à¹à¸«à¸™à¹ˆà¸‡à¹„ปมาได้ตามความเหมาะสมขà¸à¸‡à¸›à¸£à¸°à¹€à¸ ทงานที่จะใช้ในงานà¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¸™à¸±à¹‰à¸™à¹† โดยà¸à¸²à¸£à¹à¸šà¹ˆà¸‡à¸Šà¸™à¸´à¸”ขà¸à¸‡à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸ˆà¸°à¹à¸šà¹ˆà¸‡à¸•à¸²à¸¡à¸¥à¸±à¸à¸©à¸“ะรูปทรงขà¸à¸‡à¸žà¸·à¹‰à¸™à¸—ี่ทำงาน (Envelope Geometric) ขà¸à¸‡à¸ˆà¸¸à¸”ต่ภ(Joint) ขà¸à¸‡à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸ªà¸²à¸¡à¸²à¸£à¸–à¹à¸šà¹ˆà¸‡à¹„ด้ 2 à¹à¸šà¸š ดังนี้ 1. ชนิด Revolute (R) เป็นà¸à¸²à¸£à¸«à¸¡à¸¸à¸™à¸£à¸à¸šà¹à¸à¸™ (Rotary) 2.Prismatic (P) เป็นà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่เชิงเส้น (Linear motion) à¹à¸¥à¸°à¹€à¸¡à¸·à¹ˆà¸à¸™à¸³à¸ˆà¸¸à¸”ต่à¸à¸‚à¸à¸‡à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸—ั้งสà¸à¸‡à¹à¸šà¸šà¸¡à¸²à¸•à¹ˆà¸à¹€à¸‚้าด้วยà¸à¸±à¸™à¸à¸¢à¹ˆà¸²à¸‡à¸™à¹‰à¸à¸¢ 3 à¹à¸à¸™à¸«à¸¥à¸±à¸à¸ˆà¸°à¹„ด้พื้นที่ทำงาน ( Work envelope) ที่มีลัà¸à¸©à¸“ะà¹à¸•à¸à¸•à¹ˆà¸²à¸‡à¸à¸±à¸™à¹„ปà¸à¹‡à¸ˆà¸°à¹„ด้ประเภทà¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸•à¹ˆà¸²à¸‡à¹† ใช้ในวงà¸à¸²à¸£à¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡
ประเภทขà¸à¸‡à¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸—ี่นิยมใช้ในวงà¸à¸²à¸£à¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡ ได้à¹à¸à¹ˆ
1. Cartesian (Gantry) Robot à¹à¸à¸™à¸—ั้ง 3 ขà¸à¸‡à¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸ˆà¸°à¹€à¸„ลื่à¸à¸™à¸—ี่เป็นà¹à¸šà¸šà¹€à¸Šà¸´à¸‡à¹€à¸ªà¹‰à¸™ (Prismatic) ถ้าโครงสร้างมีลัà¸à¸©à¸“ะคล้าย Overhead Crane จะเรียà¸à¸§à¹ˆà¸²à¹€à¸›à¹‡à¸™à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œà¸Šà¸™à¸´à¸” Gantry à¹à¸•à¹ˆà¸–้าหุ่นยนต์ไม่มีขาตั้งหรืà¸à¸‚าเป็นà¹à¸šà¸šà¸à¸·à¹ˆà¸™ เรียà¸à¸§à¹ˆà¸² ชนิด Cartesian
ข้à¸à¸”ี
1. เคลื่à¸à¸™à¸—ี่เป็นà¹à¸™à¸§à¹€à¸ªà¹‰à¸™à¸•à¸£à¸‡à¸—ั้ง 3 มิติ
2. à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่สามารถทำความเข้าใจง่าย
3. มีส่วนประà¸à¸à¸šà¸‡à¹ˆà¸²à¸¢à¹†
4. โครงสร้างà¹à¸‚็งà¹à¸£à¸‡à¸•à¸¥à¸à¸”à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่
ข้à¸à¹€à¸ªà¸µà¸¢
1. ต้à¸à¸‡à¸à¸²à¸£à¸žà¸·à¹‰à¸™à¸—ี่ติดตั้งมาà¸
2. บริเวณที่หุ่นยนต์เข้าไปทำงานได้ จะเล็à¸à¸à¸§à¹ˆà¸²à¸‚นาดขà¸à¸‡à¸•à¸±à¸§à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œ
3. ไม่สามารถเข้าถึงวัตถุจาà¸à¸—ิศทางข้างใต้ได้
4. à¹à¸à¸™à¹à¸šà¸šà¹€à¸Šà¸´à¸‡à¹€à¸ªà¹‰à¸™à¸ˆà¸° Seal เพื่à¸à¸›à¹‰à¸à¸‡à¸à¸±à¸™à¸à¸¸à¹ˆà¸™à¹à¸¥à¸°à¸‚à¸à¸‡à¹€à¸«à¸¥à¸§à¹„ด้ยาà¸
à¸à¸²à¸£à¸›à¸£à¸°à¸¢à¸¸à¸à¸•à¹Œà¹ƒà¸Šà¹‰à¸‡à¸²à¸™
เนื่à¸à¸‡à¸ˆà¸²à¸à¹‚ครงสร้างมีความà¹à¸‚็งà¹à¸£à¸‡à¸•à¸¥à¸à¸”à¹à¸™à¸§à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ ดังนั้นจึงเหมาะà¸à¸±à¸šà¸‡à¸²à¸™à¹€à¸„ลื่à¸à¸™à¸¢à¹‰à¸²à¸¢à¸‚à¸à¸‡à¸«à¸™à¸±à¸à¹† หรืà¸à¹€à¸£à¸µà¸¢à¸à¸§à¹ˆà¸²à¸‡à¸²à¸™ Pick-and-Place เช่น ใช้โหลดชิ้นงานเข้าเครื่à¸à¸‡à¸ˆà¸±à¸à¸£ (Machine loading) ใช้จัดเà¸à¹‡à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™ (Stacking) นà¸à¸à¸ˆà¸²à¸à¸™à¸µà¹‰à¸¢à¸±à¸‡à¸ªà¸²à¸¡à¸²à¸£à¸–ใช้ในงานประà¸à¸à¸š (Assembly) ที่ไม่ต้à¸à¸‡à¸à¸²à¸£à¹€à¸‚้าถึงในลัà¸à¸©à¸“ะที่มีมุมหมุน เช่น ประà¸à¸à¸šà¸à¸¸à¸›à¸à¸£à¸“์à¸à¸´à¹€à¸¥à¹‡à¸à¸—รà¸à¸™à¸´à¸à¸ªà¹Œ à¹à¸¥à¸°à¸‡à¸²à¸™ Test ต่างๆ
2. Cylindrical Robot หุ่นยนต์ประเภทนี้จะมีà¹à¸à¸™à¸—ี่ 2 (ไหล่) à¹à¸¥à¸°à¹à¸à¸™à¸—ี่ 3 (ข้à¸à¸¨à¸à¸) เป็นà¹à¸šà¸š Prismatic ส่วนà¹à¸à¸™à¸—ี่ 1 (เà¸à¸§) จะเป็นà¹à¸šà¸šà¸«à¸¡à¸¸à¸™ (Revolute) ทำให้à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ได้พื้นที่à¸à¸²à¸£à¸—ำงานเป็นรูปทรงà¸à¸£à¸°à¸šà¸à¸
ข้à¸à¸”ี
1. มีส่วนประà¸à¸à¸šà¹„ม่ซับซ้à¸à¸™
2. à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่สามารถเข้าใจได้ง่าย
3. สามารถเข้าถึงเครื่à¸à¸‡à¸ˆà¸±à¸à¸£à¸—ี่มีà¸à¸²à¸£à¹€à¸›à¸´à¸” – ปิด หรืà¸à¹€à¸‚้าไปในบริเวณที่เป็นช่à¸à¸‡à¸«à¸£à¸·à¸à¹‚พรงได้ง่าย (Loading) เช่น à¸à¸²à¸£à¹‚หลดชิ้นงานเข้าเครื่à¸à¸‡ CNC
ข้à¸à¹€à¸ªà¸µà¸¢
1. มีพื้นที่ทำงานจำà¸à¸±à¸”
2. à¹à¸à¸™à¸—ี่เป็นเชิงเส้นมีความยุ่งยาà¸à¹ƒà¸™à¸à¸²à¸£ Seal เพื่à¸à¸›à¹‰à¸à¸‡à¸à¸±à¸™à¸à¸¸à¹ˆà¸™à¹à¸¥à¸°à¸‚à¸à¸‡à¹€à¸«à¸¥à¸§
à¸à¸²à¸£à¸›à¸£à¸°à¸¢à¸¸à¸à¸•à¹Œà¹ƒà¸Šà¹‰à¸‡à¸²à¸™
โดยทั่วไปจะใช้ในà¸à¸²à¸£à¸«à¸¢à¸´à¸šà¸¢à¸à¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™ (Pick-and-Place) หรืà¸à¸›à¹‰à¸à¸™à¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™à¹€à¸‚้าเครื่à¸à¸‡à¸ˆà¸±à¸à¸£ เพราะสามารถเคลื่à¸à¸™à¸—ี่เข้าà¸à¸à¸à¸šà¸£à¸´à¹€à¸§à¸“ที่เป็นช่à¸à¸‡à¹‚พรงเล็à¸à¹† ได้สะดวà¸
3. Spherical Robot (Polar) มีสà¸à¸‡à¹à¸à¸™à¸—ี่เคลื่à¸à¸™à¹ƒà¸™à¸¥à¸±à¸à¸©à¸“ะà¸à¸²à¸£à¸«à¸¡à¸¸à¸™ (Revolute Joint) คืà¸à¹à¸à¸™à¸—ี่ 1 (เà¸à¸§) à¹à¸¥à¸°à¹à¸à¸™à¸—ี่ 2 (ไหล่) ส่วนà¹à¸à¸™à¸—ี่ 3 (ข้à¸à¸¨à¸à¸) จะเป็นลัà¸à¸©à¸“ะขà¸à¸‡à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่à¹à¸™à¸§à¹€à¸ªà¹‰à¸™à¸•à¸£à¸‡
ข้à¸à¸”ี
1. มีปริมาตรà¸à¸²à¸£à¸—ำงานมาà¸à¸‚ึ้นเนื่à¸à¸‡à¸ˆà¸²à¸à¸à¸²à¸£à¸«à¸¡à¸¸à¸™à¸‚à¸à¸‡à¹à¸à¸™à¸—ี่ 2 (ไหล่)
2. สามารถที่จะà¸à¹‰à¸¡à¸¥à¸‡à¸¡à¸²à¸ˆà¸±à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™à¸šà¸™à¸žà¸·à¹‰à¸™à¹„ด้สะดวà¸
ข้à¸à¹€à¸ªà¸µà¸¢
1. มีระบบพิà¸à¸±à¸” (Coordinate) à¹à¸¥à¸°à¸ªà¹ˆà¸§à¸™à¸›à¸£à¸°à¸à¸à¸š ที่ซับซ้à¸à¸™
2. à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่à¹à¸¥à¸°à¸£à¸°à¸šà¸šà¸„วบคุมมีความซับซ้à¸à¸™à¸‚ึ้น
à¸à¸²à¸£à¸›à¸£à¸°à¸¢à¸¸à¸à¸•à¹Œà¹ƒà¸Šà¹‰à¸‡à¸²à¸™
ใช้ในงานที่มีà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ในà¹à¸™à¸§à¸•à¸±à¹‰à¸‡ (Vertical) เพียงเล็à¸à¸™à¹‰à¸à¸¢ เช่น à¸à¸²à¸£à¹‚หลดชิ้นงานเข้าà¸à¸à¸à¸ˆà¸²à¸à¹€à¸„รื่à¸à¸‡à¸›à¸±à¹‰à¸¡ (Press) หรืà¸à¸à¸²à¸ˆà¸ˆà¸°à¹ƒà¸Šà¹‰à¸‡à¸²à¸™à¹€à¸Šà¸·à¹ˆà¸à¸¡à¸ˆà¸¸à¸” (Spot Welding)

4. SCARA Robot จะมีลัà¸à¸©à¸“ะà¹à¸à¸™à¸—ี่ 1 (เà¸à¸§) à¹à¸¥à¸°à¹à¸à¸™à¸—ี่ 3 (ข้à¸à¸¨à¸à¸) หมุนรà¸à¸šà¹à¸à¸™à¹à¸™à¸§à¸•à¸±à¹‰à¸‡ à¹à¸¥à¸°à¹à¸à¸™à¸—ี่ 2 จะเป็นลัà¸à¸©à¸“ะà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ขึ้นลง (Prismatic) ซึ่งหุ่นยนต์ SCARA จะเคลื่à¸à¸™à¸—ี่ได้รวดเร็วในà¹à¸™à¸§à¸£à¸°à¸™à¸²à¸š à¹à¸¥à¸°à¸¡à¸µà¸„วามà¹à¸¡à¹ˆà¸™à¸¢à¸³à¸ªà¸¹à¸‡
ข้à¸à¸”ี
1. สามารถเคลื่à¸à¸™à¸—ี่ในà¹à¸™à¸§à¸£à¸°à¸™à¸²à¸š à¹à¸¥à¸°à¸‚ึ้นลงได้รวดเร็ว
2. มีความà¹à¸¡à¹ˆà¸™à¸¢à¸³à¸ªà¸¹à¸‡
ข้à¸à¹€à¸ªà¸µà¸¢
1. มีพื้นที่ทำงานจำà¸à¸±à¸”
2. ไม่สามารถหมุน (rotation)ในลัà¸à¸©à¸“ะมุมต่างๆได้
3. สามารถยà¸à¸™à¹‰à¸³à¸«à¸™à¸±à¸ (Payload) ได้ไม่มาà¸à¸™à¸±à¸
à¸à¸²à¸£à¸›à¸£à¸°à¸¢à¸¸à¸à¸•à¹Œà¹ƒà¸Šà¹‰à¸‡à¸²à¸™
เนื่à¸à¸‡à¸ˆà¸²à¸à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ในà¹à¸™à¸§à¸£à¸°à¸™à¸²à¸šà¹à¸¥à¸°à¸‚ึ้นลงได้รวดเร็วจึงเหมาะà¸à¸±à¸šà¸‡à¸²à¸™à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸ªà¹ˆà¸§à¸™à¸—างà¸à¸´à¹€à¸¥à¹‡à¸à¸—รà¸à¸™à¸´à¸à¸ªà¹Œ ซึ่งต้à¸à¸‡à¸à¸²à¸£à¸„วามรวดเร็วà¹à¸¥à¸°à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่à¸à¹‡à¹„ม่ต้à¸à¸‡à¸à¸²à¸£à¸à¸²à¸£à¸«à¸¡à¸¸à¸™à¸¡à¸²à¸à¸™à¸±à¸ à¹à¸•à¹ˆà¸ˆà¸°à¹„ม่เหมาะà¸à¸±à¸šà¸‡à¸²à¸™à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸ªà¹ˆà¸§à¸™à¸—างà¸à¸¥ (Mechanical Part) ซึ่งส่วนใหà¸à¹ˆà¸à¸²à¸£à¸›à¸£à¸°à¸à¸à¸šà¸ˆà¸°à¸à¸²à¸¨à¸±à¸¢à¸à¸²à¸£à¸«à¸¡à¸¸à¸™ (Rotation)ในลัà¸à¸©à¸“ะมุมต่างๆ นà¸à¸à¸ˆà¸²à¸à¸™à¸µà¹‰ SCARA Robot ยังเหมาะà¸à¸±à¸šà¸‡à¸²à¸™à¸•à¸£à¸§à¸ˆà¸ªà¸à¸š (Inspection) งานบรรจุภัณฑ์ (Packaging)
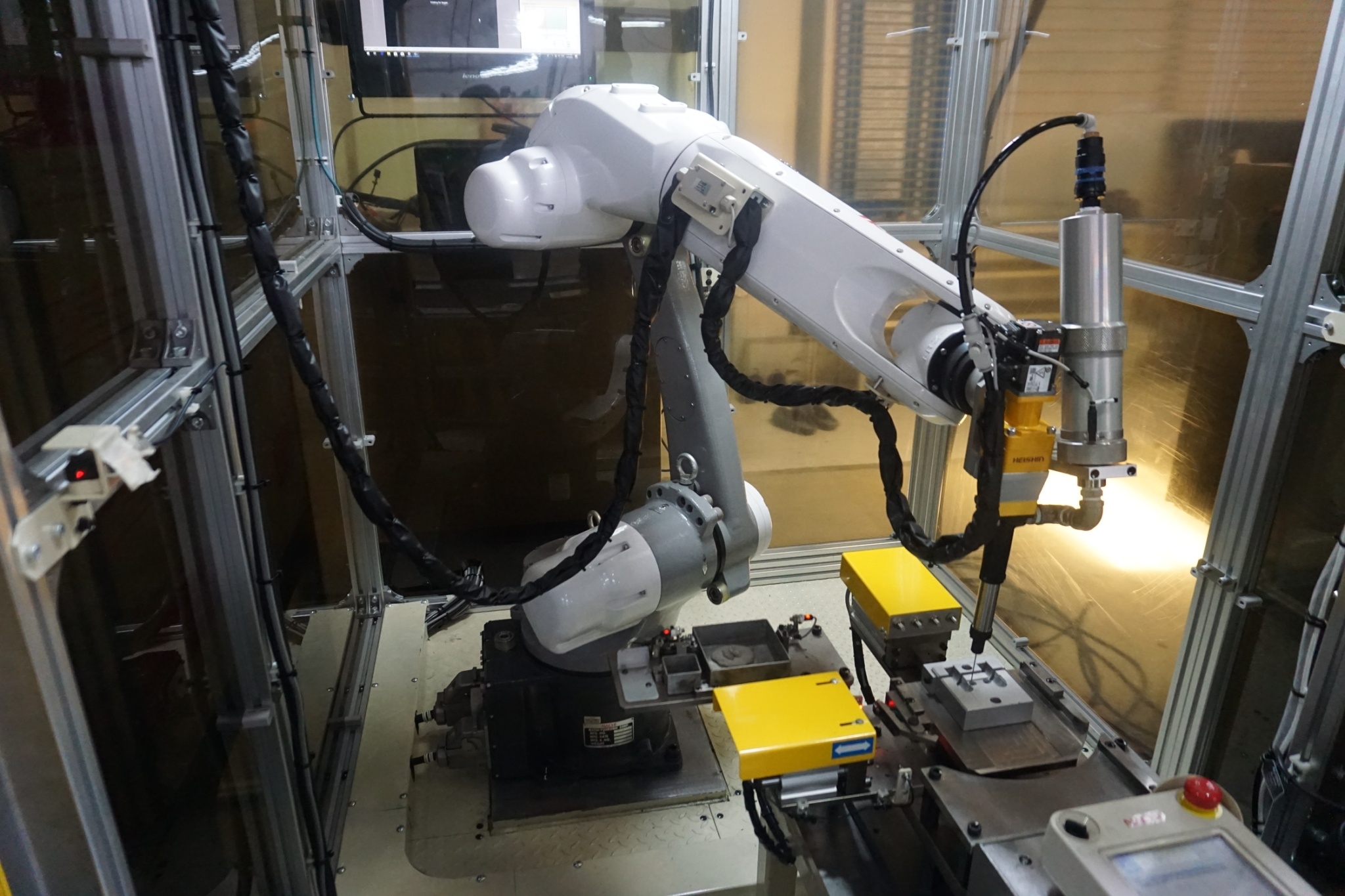
5. Articulated Arm ทุà¸à¹à¸à¸™à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่จะเป็นà¹à¸šà¸šà¸«à¸¡à¸¸à¸™ (Revolute) รูปà¹à¸šà¸šà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่จะคล้ายà¸à¸±à¸šà¹à¸‚นคน ซึ่งจะประà¸à¸à¸šà¸”้วยช่วงเà¸à¸§ ท่à¸à¸™à¹à¸‚นบน ท่à¸à¸™à¹à¸‚นล่าง ข้à¸à¸¡à¸·à¸ à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ทำให้ได้พื้นที่à¸à¸²à¸£à¸—ำงาน
ข้à¸à¸”ี
1. เนื่à¸à¸‡à¸ˆà¸²à¸à¸—ุà¸à¹à¸à¸™à¸ˆà¸°à¹€à¸„ลื่à¸à¸™à¸—ี่ในลัà¸à¸©à¸“ะ ขà¸à¸‡à¸à¸²à¸£à¸«à¸¡à¸¸à¸™à¸—ำให้มีความยืดหยุ่นสูงในà¸à¸²à¸£à¹€à¸‚้าไปยังจุดต่างๆ
2. บริเวณข้à¸à¸•à¹ˆà¸ (Joint) สามารถ Seal เพื่à¸à¸›à¹‰à¸à¸‡à¸à¸±à¸™à¸à¸¸à¹ˆà¸™ ความชื้น หรืà¸à¸™à¹‰à¸³ ได้ง่าย
3. มีพื้นที่à¸à¸²à¸£à¸—ำงานมาà¸
4. สามารถเข้าถึงชิ้นงานทั้งจาà¸à¸”้านบน ด้านล่าง
5. เหมาะà¸à¸±à¸šà¸à¸²à¸£à¹ƒà¸Šà¹‰à¸¡à¸à¹€à¸•à¸à¸£à¹Œà¹„ฟฟ้า เป็นชุดขับเคลื่à¸à¸™
ข้à¸à¹€à¸ªà¸µà¸¢
1. มีระบบพิà¸à¸±à¸” (Coordinate) ที่ซับซ้à¸à¸™
2. à¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่à¹à¸¥à¸°à¸£à¸°à¸šà¸šà¸„วบคุมทำความ รถขนถ่ายวัสดุà¸à¸±à¸•à¹‚นมัติ เข้าใจได้ยาà¸à¸‚ึ้น
3. ควบคุมให้เคลื่à¸à¸™à¸—ี่ในà¹à¸™à¸§à¹€à¸ªà¹‰à¸™à¸•à¸£à¸‡ (Linear) ได้ยาà¸
4.โครงสร้างไม่มั่นคงตลà¸à¸”ช่วงà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ เพราะบริเวณขà¸à¸š Work Envelope ปลายà¹à¸‚นจะ
5. มีà¸à¸²à¸£à¸ªà¸±à¹ˆà¸™ ทำให้ความà¹à¸¡à¹ˆà¸¢à¸³à¸¥à¸”ลง
à¸à¸²à¸£à¸›à¸£à¸°à¸¢à¸¸à¸à¸•à¹Œà¹ƒà¸Šà¹‰à¸‡à¸²à¸™
หุ่นยนต์ชนิดนี้สามารถใช้งานได้à¸à¸§à¹‰à¸²à¸‡à¸‚วางเพราะสามารถเข้าถึงตำà¹à¸«à¸™à¹ˆà¸‡à¸•à¹ˆà¸²à¸‡à¹† ได้ดี เช่น งานเชื่à¸à¸¡ Spot Welding, Path Welding, งานยà¸à¸‚à¸à¸‡, งานตัด, งานทาà¸à¸²à¸§, งานที่มีà¸à¸²à¸£à¹€à¸„ลื่à¸à¸™à¸—ี่ยาà¸à¹† เช่น งานพ่นสี งาน Sealing ฯลฯ
ดังนั้นจะเห็นได้ว่า Industrial Robot นั้นมีหลาà¸à¸«à¸¥à¸²à¸¢à¸›à¸£à¸°à¹€à¸ ท à¹à¸•à¹ˆà¸§à¹ˆà¸²à¸ªà¸´à¹ˆà¸‡à¸«à¸™à¸¶à¹ˆà¸‡à¸—ี่หุ่นยนต์à¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¸¡à¸µà¸›à¸£à¸°à¹‚ยชน์เหมืà¸à¸™à¸à¸±à¸™ คืภสามารถช่วยทุ่นà¹à¸£à¸‡à¹ƒà¸™à¸à¸²à¸£à¸—ำงานต่าง ๆ à¹à¸—นมนุษย์ได้เป็นà¸à¸¢à¹ˆà¸²à¸‡à¸”ี เช่น งานยà¸à¸ªà¸´à¸™à¸„้าจาà¸à¸ªà¸²à¸¢à¸‡à¸²à¸™à¸à¸²à¸£à¸œà¸¥à¸´à¸• งานประà¸à¸à¸š งานเชื่à¸à¸¡ งานตัด เป็นต้น

บริษัท ไà¸.เà¸à¹‡à¸¡.à¸à¸µ. รีโวลูชั่น จำà¸à¸±à¸” เป็นผู้เชี่ยวชาà¸à¸”้านผลิตเครื่à¸à¸‡à¸ˆà¸±à¸à¸£à¸£à¸°à¸šà¸šà¸à¸±à¸•à¹‚นมัติที่ใช้ในโรงงานà¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¹à¸šà¸šà¸„รบวงจร เช่น เครื่à¸à¸‡à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™ à¹à¸‚นà¸à¸¥à¸«à¸¸à¹ˆà¸™à¸¢à¸™à¸•à¹Œ เครื่à¸à¸‡à¸ˆà¸±à¸à¸£à¸£à¸°à¸šà¸šà¸à¸±à¸•à¹‚นมัติ หุ่นยนต์หยิบจับชิ้นงาน รถขนถ่ายวัสดุà¸à¸±à¸•à¹‚นมัติ เครื่à¸à¸‡à¸•à¸£à¸§à¸ˆà¸ªà¸à¸šà¹à¸¥à¸°à¸—ดสà¸à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™ เครื่à¸à¸‡à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™ เป็นต้น ซึ่งทางบริษัทฯ รับà¸à¸à¸à¹à¸šà¸šà¹à¸¥à¸°à¸œà¸¥à¸´à¸•à¹€à¸„รื่à¸à¸‡à¸ˆà¸±à¸à¸£à¸£à¸°à¸šà¸šà¸à¸±à¸•à¹‚นมัติทุà¸à¸Šà¸™à¸´à¸” โดยมีทีมงานผู้เชี่ยวชาà¸à¹à¸¥à¸°à¹€à¸—คโนโลยีที่ทันสมัยสามารถตà¸à¸šà¸ªà¸™à¸à¸‡à¸„วามต้à¸à¸‡à¸à¸²à¸£à¸‚à¸à¸‡à¸¥à¸¹à¸à¸„้าได้เป็นà¸à¸¢à¹ˆà¸²à¸‡à¸”ี ตั้งà¹à¸•à¹ˆà¸Šà¹ˆà¸§à¸¢à¸¥à¸¹à¸à¸„้าตัดสินในเรื่à¸à¸‡à¸à¸²à¸£à¸¥à¸‡à¸—ุน ด้านà¸à¸à¹‚ตเมชั้น à¸à¸²à¸£à¸•à¸´à¸”ตั้ง à¸à¸²à¸£à¸à¸¶à¸à¸à¸šà¸£à¸¡à¸à¸²à¸£à¹ƒà¸Šà¹‰à¸‡à¸²à¸™ รวมถึงà¸à¸²à¸£à¸”ูà¹à¸¥à¸£à¸±à¸à¸©à¸²à¸‹à¹ˆà¸à¸¡à¸šà¸³à¸£à¸¸à¸‡ มีà¸à¸°à¹„หล่ให้เปลี่ยนตามà¸à¸²à¸¢à¸¸à¸à¸²à¸£à¹ƒà¸Šà¹‰à¸‡à¸²à¸™
---------------------------------------------------------------------------
บทความที่เà¸à¸µà¹ˆà¸¢à¸§à¸‚้à¸à¸‡
• มาทำความรู้จัภบริษัท ไà¸.เà¸à¹‡à¸¡.à¸à¸µ. รีโวลูชั่น จำà¸à¸±à¸”
• รถขนถ่ายวัสดุà¸à¸±à¸•à¹‚นมัติ สุดยà¸à¸”ตัวช่วยสำหรับà¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¹‚ลจิสติà¸à¸ªà¹Œ
• ตà¸à¸šà¹‚จทย์à¸à¸²à¸£à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™à¸ªà¸³à¸«à¸£à¸±à¸šà¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¸¢à¸²à¸™à¸¢à¸™à¸•à¹Œ ด้วย “เครื่à¸à¸‡à¸›à¸£à¸°à¸à¸à¸šà¸Šà¸´à¹‰à¸™à¸‡à¸²à¸™” เทคโนโลยีสุดล้ำ
____________________________________________________
สนใจชมข้à¸à¸¡à¸¹à¸¥à¹€à¸žà¸´à¹ˆà¸¡à¹€à¸•à¸´à¸¡à¸œà¹ˆà¸²à¸™ Marketplace
www.brandexdirectory.com
เว็บไซต์รวมสินค้าà¸à¸¸à¸•à¸ªà¸²à¸«à¸à¸£à¸£à¸¡à¸à¸±à¸™à¸”ับต้นๆ ขà¸à¸‡à¸›à¸£à¸°à¹€à¸—ศไทย
www.pagesthai.com
เว็บไซต์รวมรายชื่à¸à¹‚รงงานผลิต ซับคà¸à¸™à¹à¸—รค à¹à¸¥à¸°à¸šà¸£à¸´à¸à¸²à¸£
www.Brand.co.th
เว็บรวมสินค้าà¹à¸šà¸£à¸™à¸”์à¹à¸¥à¸°à¸œà¸¹à¹‰à¸œà¸¥à¸´à¸•à¸ªà¸´à¸™à¸„้าà¹à¸šà¸£à¸™à¸”์
www.eeczone.com
เว็บรวมรายชื่à¸à¸œà¸¹à¹‰à¸›à¸£à¸°à¸à¸à¸šà¸à¸²à¸£à¸ าคตะวันà¸à¸à¸